Semantic Segmentation of Pets
GitHub Link
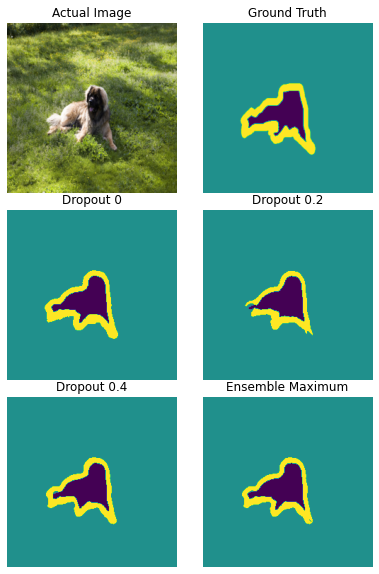
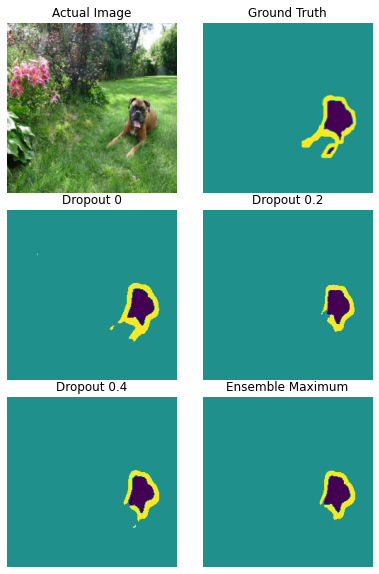
A U-Net based neural network was trained from scratch using Pytorch Lightning wrapper over the Pytorch Framework.
The dropout probability was varied to optimise the network.
Dataset
https://www.robots.ox.ac.uk/~vgg/data/pets/
O. M. Parkhi, A. Vedaldi, A. Zisserman, C. V. Jawahar
Cats and Dogs
IEEE Conference on Computer Vision and Pattern Recognition
Model
A U-Net based neural network was trained from scratch using Pytorch Lightning wrapper over the Pytorch Framework.
The dropout probability was varied to optimise the network.
Optimiser
Adam with the default learning rate of 1-3.
Loss
Cross Entropy Loss of classified pixel labels and ground data.
Callbacks
Early Stopping , Best Validation loss checkpoints.
Results